ES
Mini Excavator — Sistema de Soldadura Robotizado
Mini Excavator — Sistema de Soldadura Robotizado
May 28, 2025
Mini Excavator — Sistema de Robot de Soldadura de Plataforma y Soporte Inferior
El Sistema de Robot de Soldadura de Plataforma de la Serie SY adopta un diseño de estación única. La plataforma izquierda, la plataforma derecha y el ensamblaje de la plataforma principal se ensamblan y se sueldan provisionalmente manualmente en el dispositivo de sujeción antes de ser izados y posicionados en el dispositivo de sujeción del Sistema de Robot de Soldadura de Plataforma SY, que cuenta con sujeción automática hidráulica.
El robot realiza detección por contacto con alambre para el posicionamiento de la costura antes de ejecutar la soldadura de relleno en la plataforma. Una vez completada la soldadura, el operador iza la pieza terminada del dispositivo de sujeción y carga una nueva pieza para el siguiente ciclo.
Asignación de personal: 1 operador por turno.
El Sistema de Robot de Soldadura de Plataforma de la Serie SY adopta un diseño de estación única. La plataforma izquierda, la plataforma derecha y el ensamblaje de la plataforma principal se ensamblan y se sueldan provisionalmente manualmente en el dispositivo de sujeción antes de ser izados y posicionados en el dispositivo de sujeción del Sistema de Robot de Soldadura de Plataforma SY, que cuenta con sujeción automática hidráulica.
El robot realiza detección por contacto con alambre para el posicionamiento de la costura antes de ejecutar la soldadura de relleno en la plataforma. Una vez completada la soldadura, el operador iza la pieza terminada del dispositivo de sujeción y carga una nueva pieza para el siguiente ciclo.
Asignación de personal: 1 operador por turno.
tabla de equipos
| No. | Nombre. |
| 1 | robot Fanuc |
| 2 | colgador de 2 ejes |
| 3 | posicionador tipo L de 2 ejes |
| 4 | Dispositivo de sujeción |
| 5 | dispositivo de seguimiento láser |
| 6 | Fuente de soldadura |
| 7 | Alimentador de alambre |
| 8 | Dispositivo anti-colisión de antorcha |
| 9 | Antorcha |
| 10 | Estación de limpieza de antorcha |
| 11 | Sistema de extracción de humo |
| 12 | PLC |
| 13 | Armario de control |
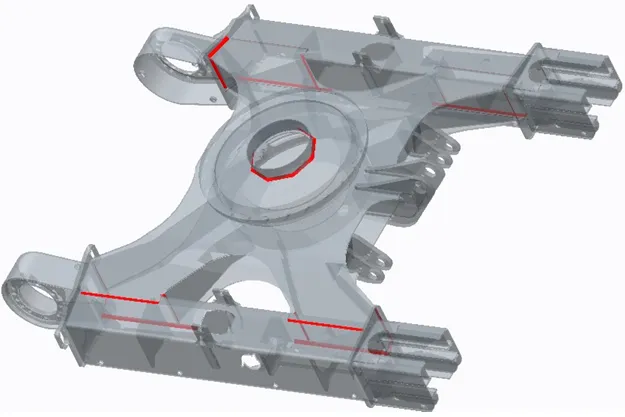
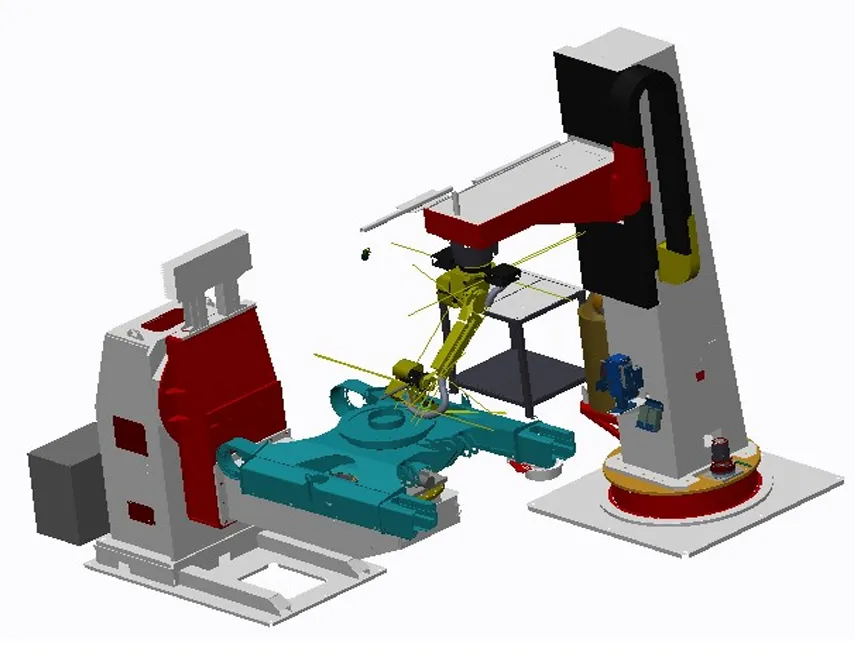
imagen del producto distribución de estación

Publicaciones Recientes

26 de octubre de 2016
El Contratista de Ingeniería Más Exitoso





May 28, 2025
Corte de Tanque de Combustible de MotocicletaContáctenos
Información del Producto
Cantidad
Unidad
Pieza
Soporte para pedidos de muestras, personalización, venta al por mayor directa y pago completo. Si el producto que busca no tiene contenido personalizado correspondiente, por favor complete el formulario a continuación para contactarnos, y le responderemos lo antes posible.